






4
メカトロニクス研究室
教授/宮崎 敏昌
助教/PADRON PARRAGA JUAN VICENTE
技術職員/吉田 勇太
- 世の中にあるものをなんでも”制御”!
- 一人一つの実機でぜいたくな実験環境!!
- ”メカ”、”エレ”両方の視点を学んで最強になろう!!!

宮崎 敏昌 先生・PADRON PARRAGA JUAN VICENTE 先生・吉田 勇太 先生
宮崎先生とJUAN先生は技大の大先輩であり、吉田先生は長岡高専のご出身です。メカトロニクス研究室では学生同士の意見・情報交換が特に重視されています。もちろん先生方も親身に相談に乗ってくださいます。
研究内容
『メカトロニクス』とはメカニクス(機械)とエレクトロニクス(電気)を融合させた技術分野のことです。現代において機械と電気要素は切っても切れない関係にあります。ロボットアームや自動車など身近な機械は見えないところで電気と制御の要素に支えられています。
現在本研究室では作業者をアシストする電動運搬機や人間の腕を再現したロボット、垂直多関節型ロボット、DC/DCコンバータなどについての研究を行っています。本研究室では電気も機械も両方勉強することのできる研究室です。
現在本研究室では作業者をアシストする電動運搬機や人間の腕を再現したロボット、垂直多関節型ロボット、DC/DCコンバータなどについての研究を行っています。本研究室では電気も機械も両方勉強することのできる研究室です。
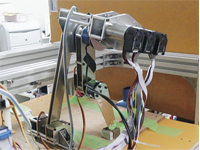
アシスト付き電動運搬機
研究室について
研究室では週に一度全体で報告会を行い、研究の進捗と今後の予定について相談します。研究室での一日の一例を紹介します。
9:00 研究室へ。一日の予定を確認。メールチェック。
9:30 午前中はシミュレーションや実験を行います。
12:00 学食や売店で食事。学生同士で外食をすることも。
18:00 夕食は学食や外食に。同輩と一緒に行くことが多いです。
日々の研究だけでなく、研究室での食事会や研究室旅行など仲を深めるイベントも開催しています。研究室の仲間と仲良くなれば苦楽を共にする最高の仲間になりますよ。
9:00 研究室へ。一日の予定を確認。メールチェック。
9:30 午前中はシミュレーションや実験を行います。
12:00 学食や売店で食事。学生同士で外食をすることも。
18:00 夕食は学食や外食に。同輩と一緒に行くことが多いです。
日々の研究だけでなく、研究室での食事会や研究室旅行など仲を深めるイベントも開催しています。研究室の仲間と仲良くなれば苦楽を共にする最高の仲間になりますよ。

研究室対抗フットサル大会
修論・卒論テーマ
- (修)すべり加速度制御を用いたパワーアシスト電動運搬車のスリップ時における感覚質量変動の低減
- (修)二慣性系の共振を励起しないねじれ剛性とねじれ粘性の同時オンライン同定手法
- (修)DABコンバータにおける電力方向切替時のヒステリシス性をもつ次数切替型外乱オブザーバによる電流応答の改善
博士後期課程
修了者数
0名
こんな研究機関、企業に就職しました
- 東芝三菱電機産業システム(株)
- 本田技研工業(株)
- 東芝キヤリア(株)
- 日立Astemo(株)
- (株)ブルボン
- (株)不二越
- 新潟電子工業(株)
- (株)椿本チエイン
- ヤンマーホールディングス(株)
- (株)ダイフク
- 北海道電力(株)
- ニッパツ・メック(株)
- 不二輸送機工業(株)
- ルネサスエレクトロニクス(株)
- スズキ(株)
